UNIVERSAL REALITY
UNIVERSAL REALITY
Next we will project the expressions in equation [3] onto the primed part of the universal reference frame. For the reason provided in connection with equation [10] β is negative and inverted as in equation [14]. Hence, δs'r/-δt'r = -β =(cosσ')-1.
(δs')2 - ((δs' + βδt')(1-β2)-1/2)2 = (δs')2 - ((δs' + (-β)(-δt'))(1-(-β)2)-1/2)2 =
β2(β2 - 1)-1((δs')2 + β-12δs'δt' + (δt')2) ⇒
csc2σ' ((δs')2 - 2δs'δt'cosσ' + (δt')2) = csc2σ' (δq')2 [17]
Our second real plane is thus defined:
√((δs')2 - 2δs'δt'cosσ' + (δt')2) = +δq', -δq' [18]
t' + q' = s' [19] [see projection]
Once more, unlike the orthonormal relationship between t'i and s' in equation [2] the relationship of δt'r with δs'r is a cosine (circular and not hyperbolic): -β-1 on account of vector t' being the ‘convolved’ projection of t'i in the real plane (defined by the right most bracketed expression in equation [18]). Vectors s' and t' are thus not necessarily normal but form an angle σ' that defines a third side ordinate vector q' in a circular relationship with t' as abscissa. As expected s' is a radius vector (i.e. q' opposes angle σ' and is normal with t') and thus invariant indirectly confirming that an elementary object’s spatial component s may undergo Lorentz contraction (while s' will aggregate to macroscopic vector s).
Equation [19] completes the symmetry between the four 2-spaces: note that the trigonometric relationship between the nominally spatial and temporal real primed vectors is the inverse of that of their imaginary primed counterparts in the same way that their trigonometric roles are the inverse of those of the corresponding vectors in the real and imaginary unprimed 2-spaces.
Vector q' is also the axis of rotation of the plane in which vector t' lies after the latter’s ‘convolution’ out of i from t'i. However, since t'i is imaginary and t' real, vector q' must be the real component of a complex axial vector of which vector p'i derived in [12] is the imaginary component.
In the discussion that resulted from equation [12], we found that vector t'i may freely rotate through angle σ'i. The discussion that followed equation [16] established the rotational correlation between the unprimed imaginary and real radial vectors si and t. The same rotational correlation will cause s' to revolve in synchronism with t'i (their coupling being a consequence of the invariance of axial vector r, the Einstein interval and of the moduli of vectors s' and t'i). Vectors t' and q' will be the mutually normal component vectors of s' exhibiting the characteristics of a 2-space section of the gravitational field of a real elementary object. We will note that equation [19] provides a view from the object’s perspective with the vectors directed away toward the object’s centre, i.e. centripetal and negative with respect to the unprimed vectors when observed from a Lorentz reference frame.
We can now see that the two other spatial coordinates that are normal to vector s and each other lie in the direction of vector p and vector t' - the latter is less surprising when considering that s' requires a reference in the observer’s Lorentz reference frame. Hence, vectors s and t' define a third real plane that is normal to the other two real planes (similarly, vectors s'i and ti define a third imaginary plane that is normal to the other two imaginary planes). Neither vector p nor t' are evident in equation [4] since they are normal spatial coordinates that are not in the line-of-sight. The discussion that followed equation [16] established that vectors p and qi are the component vectors of a complex axial vector that turned out to be the Einstein interval (vector r). Similarly, we will find vectors p'i and q' to be the component vectors of a complex axial vector that is the fundamental vector for the intersection between the imaginary and real planes defined by equations [12] and [19]. Again q' and p'i lie in their own hyperbolic vector space that differs from that of s and ti, t' and s'i, and p and qi, all are respectively ordinate and abscissa for a hyperbolic triangle whose hypotenuse and mutual intersection is (the Einstein interval) vector r [hyperbolic-circular transformation]. Furthermore, p and q', qi and p'i have their respective imaginary and real, primed and unprimed orthogonal respectively normal counterparts as the component vectors of the complex axial vector for the intersection between the third normal plane defined by vectors s and t' and the 2-space defined by the imaginary radii, and, similarly, between the 2-space formed by radii t and s' and the third imaginary plane formed by their corresponding imaginary counterparts.
We will return to the cosecants that appear in equations [7], [10], [14] and [17]. In the vector spaces of equations [9], [12], [16] and [19], these (circular) trigonometric functions cancel and thus play no role. However, the cosecant functions define the angle of inclination of the planes defined by each of the former equations with either the (circular) vector space in equation [3] or the hyperbolic vector space in equation [5]. In the case of spherical vector space the cosecants in equation [14] define the inclination angle of vector q' with respect to the hypotenuse defined by vectors s and s' (which it confirms are normal) and those in equation [17] the inclination angle of vector qi with respect to the hypotenuse defined by vectors ti and t'i. Since hyperbolic vector space is complex, the inclination angles defined by the cosecants in equation [7] relate real vectors s and t to the unprimed real vector components p and q in the corresponding hyperbolic vector spaces. Likewise the cosecants in equation [10] define the angular relationship that imaginary vectors s'i and t'i have with the primed imaginary vector components p'i and q'i in the corresponding hyperbolic vector spaces. A reverse transformation performed on the cosecants returns them to (hyperbolic) direction cosines of respectively angle θ and its complement angle (π - θ), which provides the angular relationship of the hyperbolic vector spaces with respect to the real and imaginary spherical vector spaces.
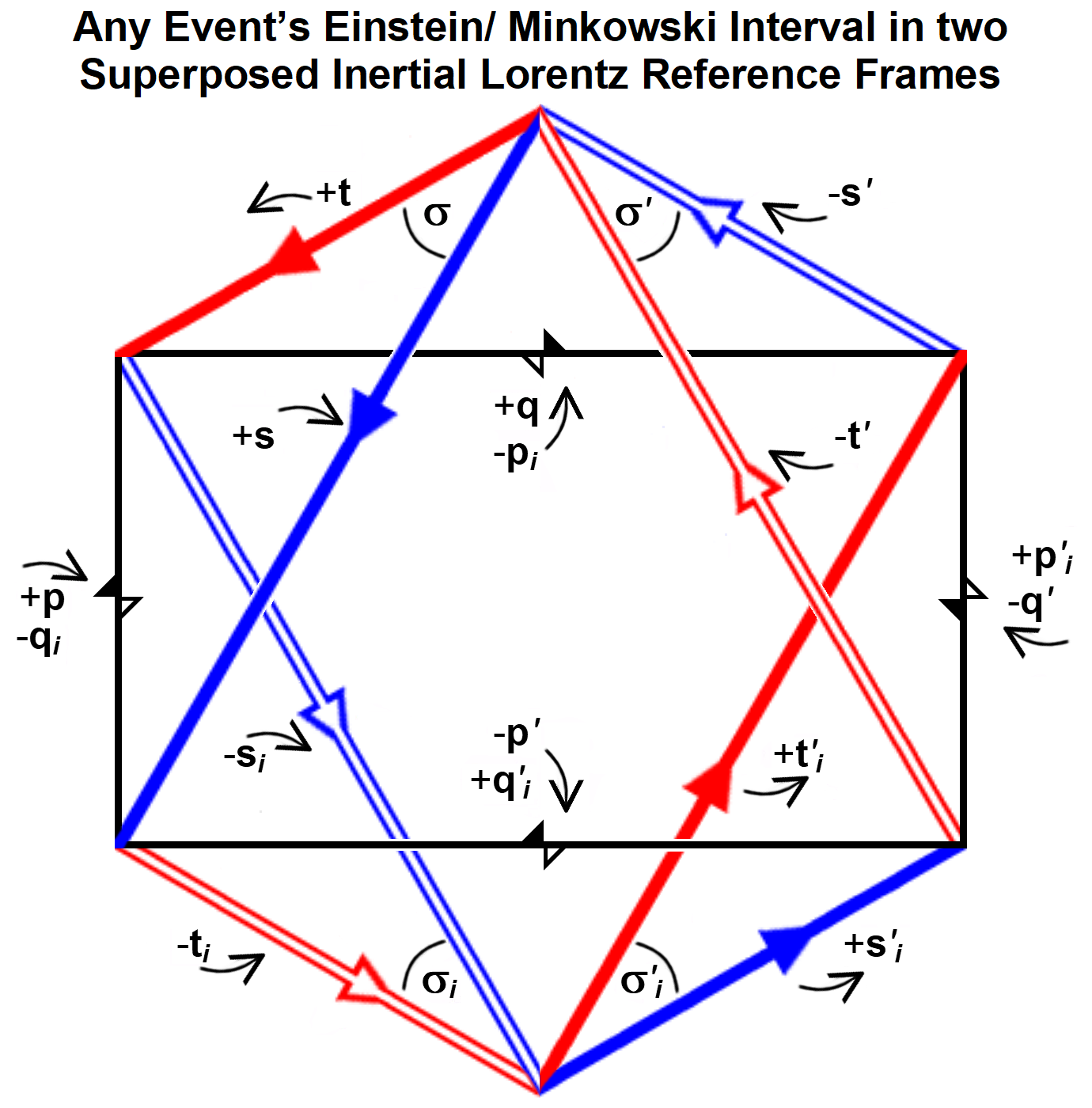
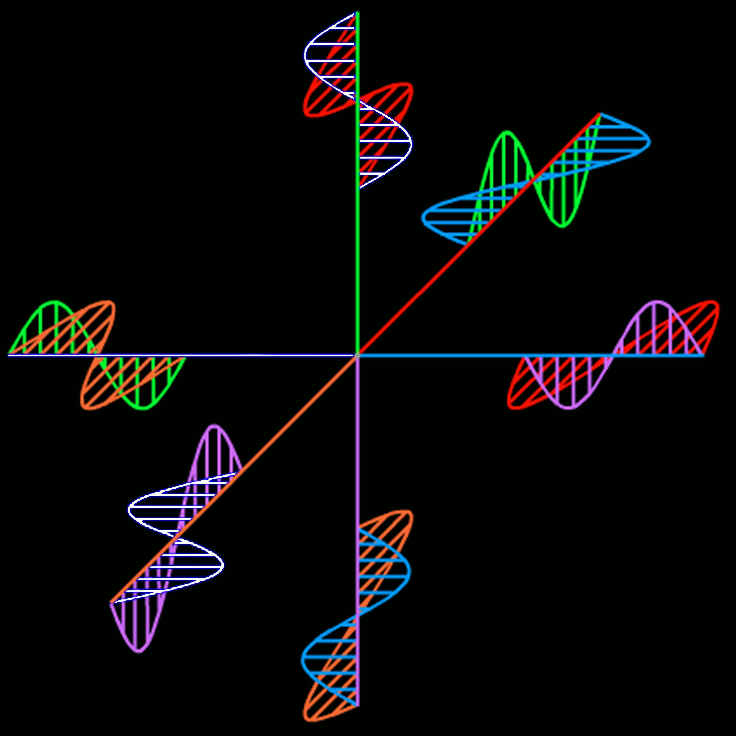
We are now ready to assemble the spaces defined in the equations in a visual presentation. One approach presented herein is a vector diagram. However, such a diagram is meant to show the relations between real vectors, nevertheless, it can easily be adapted to also show imaginary vectors. The problem that arises is how to render the complex interface between real and imaginary vectors. As we have seen a complex vector space is hyperbolic which can fairly be rendered by itself, but not readily in relation to other hyperbolic vector spaces and not at all to spherical vector space. In the latter the real and imaginary components of hyperbolic vector space offer their orthonormal components as perpendicular projections which means those of another hyperbolic vector space will superimpose. Accordingly, two such projections can be rendered in spherical vector space with the real and imaginary components of any hyperbolic vector space perpendicular to their respective real or imaginary spherical vector space, in conformity with the relationships in the hyperbolic-circular transformation. Unfortunately this approach offers but a partial solution which can only be remedied with a second vector diagram to show the other two hyperbolic vector spaces. Each diagram can show an object with only twelve sides for the sixteen vectors, meaning it will present but eight 2-spaces- an octahedron. However, in spherical vector space two such 2-spaces are composed of radii (one real and one imaginary plane) each of which intersects their respective other three normal 2-spaces and thus are superfluous. Accordingly we can construct one octahedron with the primed, unprimed, real and imaginary forms of s and t projected in spherical vector space with the corresponding forms of p and q superimposed, and asecond octahedron with the various forms of p and q in spherical vector space while s and t and their various forms are superimposed. Symmetry will permit the projection of two other combinations of the four real radius vectors with their imaginary counterparts following suit, however, the topological result would be identical and thus would not add substantial clarity. Yet there is another approach to show the normal vectors in one diagram owing to perpendicular symmetry of the vector spaces: the twelve sinusoidal moduli of component vectors can be depicted in the junction between quadrants of regular Cartesian coordinates in which all Reals are assigned to the normally positive part of an axis and their imaginary counterparts assigned to the normally negative part of an axis.
Thus far we have considered vector space from a perspective which lies in the line-of-sight. Obviously the same geometrical properties will be perceived by observers whose line-of-sight lies in one of the two other real dimensions that are normal to the line-of-sight of the first observer. However, whereas orthonormal vectors are only perceived in the line-of-sight (non-spatially and as if perpendicular) no matter the latter’s orientation in real 3-space, the components of real vectors originating in objects in a direction that is normal to the line-of-sight will be evident in real 3-space of all observers. This means that the two-dimensional real section defined by vectors t' and q' discussed in connection with equation [19] will have corresponding sections in the other two real dimensions, i.e. together they describe the three-dimensional spatial domain of the geometry of gravity: a gravitational field embedded in Euclidean geometry; their corresponding temporal vectors will all be orthonormal and thus will appear as if one undifferentiated phenomenon.
We will conclude this section with a discussion of how the properties of an elementary object and its geometry in the light of the equations and accompanying discourse presented herein are exhibited in our macroscopic environment.
We have established that elementary objects in a Lorentz reference frame are gravitational entities from whose centre, the observer, as if recedes at the speed of light. Accordingly, an elementary object’s temporal increment when determined by the observer’s macroscopic time in a Lorentz reference frame as the modulus of vector ti, hence, will be infinitely dilated (at the speed of light according to Relativity) and thus the object’s life span will be considered infinite (i.e. it will not decay, of course being elementary there exists nothing more elemental to turn into).
Suppose we would trace paths through this elementary gravitational entity observing just one condition that we will not permit our starting point to be accelerated (i.e. locally it is at rest, to a distant observer in Lorentz space-time it has an initial and constant but not necessarily linear velocity). We will find that in Lorentz space-time we can trace any number of loci (paths) which are orbital, in fact all possible orbits from circular via elliptical to straight-line undulations, (to a distant observer the orbital motion will be bi-directional and hence the undulations will come in sinusoidal pairs which are of opposite phase). The total of all points comprising the orbits will make up the entire volume of the entity meaning the entire universe since gravitation extends indefinitely without limit. In a very real sense the centre of our gravitational entity is also that of its universe with the observer at its edge at an infinite distance and vice versa (and moving apart at the speed of light), which makes the latter concurrently a distant observer and the centre of its universe. Of course all points, which from the distant observer's viewpoint orbit the centre of our gravitational entity, are locally at rest and from whose (Lorentz) geometrical view-point the centre spins in all directions all at once and other points trace an infinite assortment of loci from simple circular orbits to the most complex undulations.
Conceive that the observer would be at the 'edge' of the gravitational entity's universe and form a single system with the latter. This condition is no different from the observer occupying a single point around which the gravitational entity, now inflated from infinitesimal singularity to fill the universe, rotates in every direction all at the same time. The action on the observer would be centrifugal as when rotating a slingshot (or Newton's bucket), except not in one but in all planes of rotation. It is evident that once we invert the observer again that the centrifugal action would turn into the centripetal action of gravity. We will recognise that the notion which equates acceleration with gravity is misleading: (Einstein's principle of) equivalence of gravity and acceleration is only true if the latter acts in all directions and not as in the case of a macroscopic object in one direction only. The misapprehension results from comparing a macroscopic phenomenon- unidirectional acceleration with an elementary characteristic of gravity, its omnidirectional field has temporal components in an imaginary 3-space, i.e. the other dimensions of a gravitational field are left unaccounted in macroscopic acceleration.
The linear velocity of a point in orbit around a gravitational entity as it enters the line-of-sight of an external observer will be higher the closer it is to the centre of gravity until the speed of light is attained. A sphere circumscribed by all such points at which local space recedes from a distant observer at the speed of light is called the 'Schwarzschild' radius within which resides a black hole. One might ask why an elementary black hole should not absorb all near-by matter as a macroscopic black hole would? Obviously it would cease to be elemental if it were capable of absorbing another single element, but, as previously noted, fundamentally it cannot occupy the same space-time coordinates of another singular entity without being that other entity and vice versa. Another way of juxtaposing the macro and quantum realms is by recognizing that space-time is no different from that of an earth-bound observer, as it would for a local observer - at where on earth the Schwarzschild radius of a black hole is observed - who is not at rest, i.e. not in ‘free-fall’ but accelerated as earth’s gravity would. However, for any observer a macroscopic black hole is no longer aggregate matter but a single object whose temporal property as attributed in the observer's reference frame is infinitely dilated - hence it being 'black'.
We have shown that time is dimensional and part of an expanded vector space. The observer’s time measurement is macroscopic component vector ti, a composite result of vectorial addition of the orthonormal component of radial vectors si of all the elementary objects in the universe. Accordingly, the direction of temporal vector ti of an elementary object is aligned with our macroscopic time. However, macroscopic time is subject to the perception of an object, which may alternate between quantum or wave mode. Perception by each observer of elementary objects in one or the other mode affects the angle of its composite radial vector si to the direction of macroscopic time ti such that it is either indeterminate or zero (in the latter case the alignment of ti with the macroscopic clock is moot). Hence, the correlated magnitude of individual vectors ti is arbitrary for any observer and uncertain to all other observers. Consequently the observer will have a subtle but very personal influence over each constituent and, hence over the direction of macroscopic composite vector ti experienced only by that observer and again, hence, subtly different from that of any other observer, i.e. after intersection of these observers’ respective presents their futures will diverge.
{kind=link}
{kind=link}