UNIVERSAL REALITY
UNIVERSAL REALITY
It should be noted that the sign associated with δp2 in equation [7] is a consequence of the sign of the vectors in equation [5]. These vector signs correspond to the signs of the relationships between the spatial and scalar temporal variables in equation [2], in contrast, the latter are usually assumed to be positive quantities. The sign joining the scalar variables defines a hyperbolic relationship through the difference of their squares. In other words the signs of the scalar variables themselves are relative (if either or both should be negative instead, their squares would still be positive while no cross product will result since the angular relationship between δs and δt is considered perpendicular as in fact they are orthonormal in hyperbolic vector space). Since equation [2] has conventionally been interpreted as a relation between a vector and a scalar, the fact that the sign of the squared Einstein interval depends on whether the squared spatial variable is subtracted from the squared temporal variable or vice versa, is otherwise usually assumed not to have further relevance. Accordingly, equation [2] and the Lorentz transformations will yield acceptable results regardless of the sign assigned to its space-time variables. However, the sign of a vector is never arbitrary but associated with the orientation of its direction (i.e. reflected or not, and not associated with its modulus). Moreover, if the vector is the resultant of other vectors, its sign is in turn determined by the signs of the latter and even if its modulus were rendered as zero does not cause the vector to disappear.
Next we will project the expressions in equation [5] onto the primed part of the universal reference frame. Note that, while in Lorentz space-time δt'r is always positive, β in the primed frame is actually -δs'r/δt'r. However, the negative sign can be ignored in hyperbolic space as β is squared in the Lorentz transformation coefficients and the same convention would similarly affect the direction of δs' thus ensuring a consistent outcome. The reason for the reversal is that δsr' measured in the primed frame will be from the observed object's vantage point as perceived by the observer (the actual view from the object's vantage point would also be in the form of equation [7]). Hence, when δs' and δs'r are negative, -δs'r/δt'r = -β (unlike Lorentz geometry where β has the same value in the primed and unprimed frames, that of the circular function β is not necessarily the same in different planes in spherical vector space).
Equation [10] below shows that the projection is in the primed imaginary part of the universal reference frame. However, the imaginary vectors in equation [12] below and real vectors in equation [9] have no angular relationship, which is simply orthonormal. (The real and imaginary continua are coincident without being concomitant in the same sense of 2-space where a plane will not occupy any area in a second plane that it intersects. Real and imaginary planes share a 1-space in an axial vector, however, as part of the discussion following equation [16] we will resolve that this vector can be axially orientated from a real to an imaginary plane). Hence, cosσ'i is uniquely defined by the direction of the imaginary vectors that include angle σ'i.
(δs')2 + ((δt' + βδs')(1-β2)-1/2)2 = (δs')2 + ((δt' + (-β)(-δs'))(1-(-β)2)-1/2)2 =
(β2 - 1)-1((δs')2 + β2δs'δt' + (δt')2) ⇒
-csc2σ'i ((δs')2 - 2δs'δt'cosσ'i + (δt')2) = -csc2σ'i (δp')2 [10]
Our first imaginary plane is thus defined
i√((δs')2 - 2δs'δt'cosσ'i + (δt')2)) = +δip', - δip' [11]
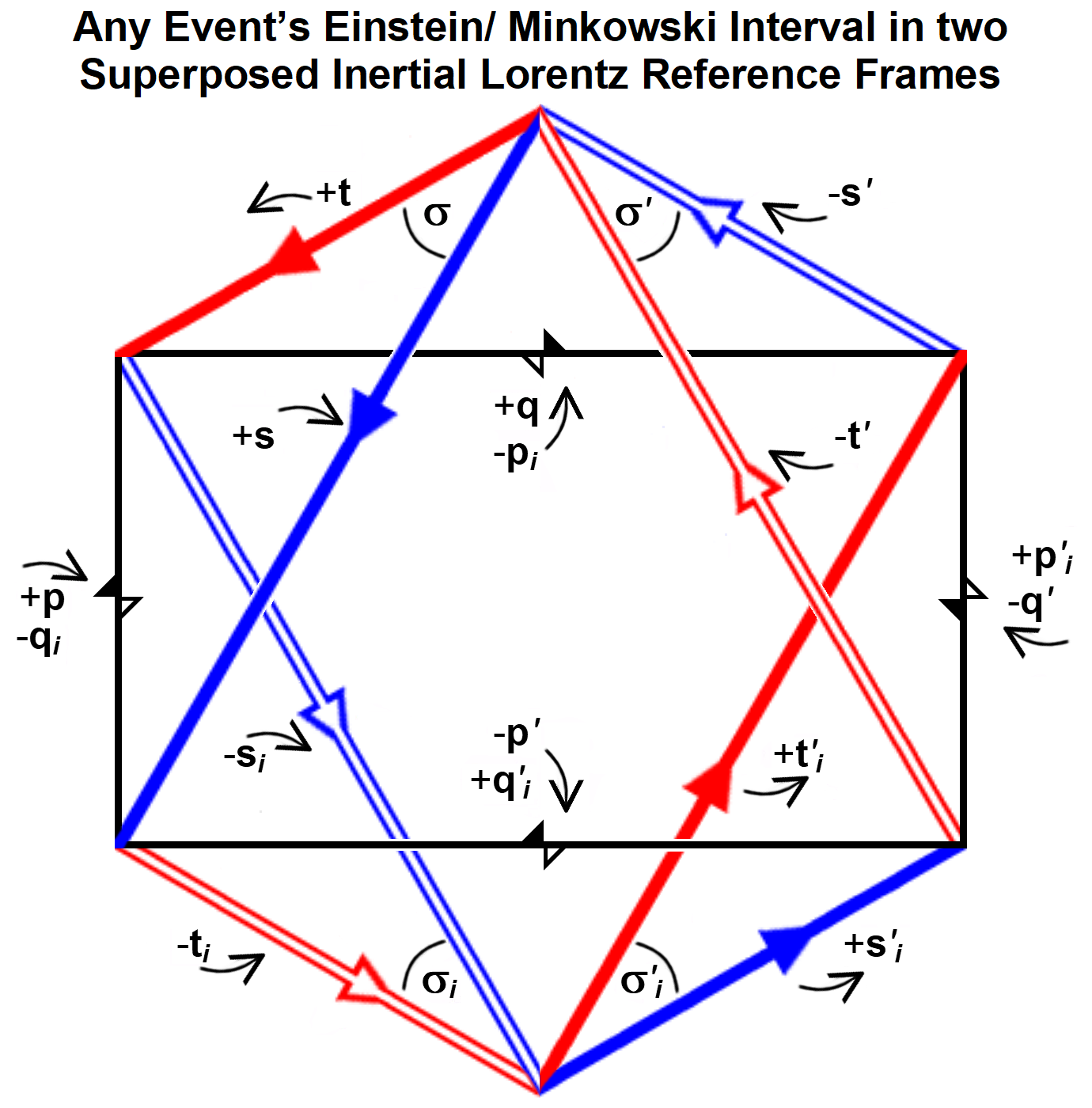
s'i + p'i = t'i [12] [see projection, octahedron]
We note that while vector t'i is still present in equation [12], vector s' the subject of spatial observation of an elementary object is no longer manifest. Owing to vector -s' convolving’ into i to become vector s'i and its effect on the projection of -δs'r in the imaginary plane defined by equation [11], the latter’s relation with δt'r (both are now imaginary) is a cosine (again circular and not hyperbolic). The direction of vectors s'i and t'i determines an angle σ'i subtended by a third side ordinate vector p'i in a circular relationship with s'i as abscissa and t'i as invariant radius vector (i.e. p'i opposes angle σ'i and is orthogonal with s'i, hence, the latter is not necessarily orthogonal with t'i). Accordingly, vector p'i is also the axis of rotation of the plane in which vector s'i lies. However, s'i is an imaginary vector while s' is real, thus the vector (this vector will be derived in [19]) of rotation of s' must be the real component of a complex axial vector of which vector p'i is the imaginary component
We will reconsider the limit case of the differential speed between the unprimed and primed Lorentz reference frames being equal to that of light. An object with a velocity close to that of light is conceived as moving in linear spatial increments that are nearly equal to temporal increments which are also thought of as linear (c = 1 ≈ s/t ≤ 1). However, the notion of sub-luminal velocities only considers (macroscopic) space-time measurements in the observer’s Lorentz frame whereas observing the attributes of elementary objects requires a temporal component from the unprimed and a spatial component from the primed Lorentz reference frame. Moreover, in contrast to sub-luminal velocities in macroscopic space-time, an elementary object is at rest when observed in its own (the universal) reference frame or is at the velocity of light with respect to an observer’s reference frame (the geometrical meaning of the velocity of light in the context of elementary objects is further discussed in connection with equation [16] below
Equation [11] provides a perspective of an imaginary plane of an elementary object. We will recall that imaginary vectors will be orthonormal to a real plane regardless of their direction in any imaginary plane. Hence, vector t'i can freely rotate through angle σ'i without the plane on which it lies losing its orthonormal relation to the observer. A rotation of radius vector t'i through angle σ'i between 0 and 2π will produce two mutually orthogonal (imaginary) projections, vectors s'i and p'i whose moduli will be sinusoidal. Vectors s'i and p'i we will find are also orthogonal to vector t'i (whose vectorial relations will be derived in equation [16]), the axis of rotation of vector ti and like t'i are orthonormal to any real plane being observed, thus all will appear to have the same direction as macroscopic ti. Hence, any value of cosσ'i as projected by its constituent vectors will render β in the observer’s Lorentz frame to be at unity. Accordingly, the sinusoids will propagate in a Lorentz frame from the object at the velocity of light at any phase (of σ'i) in the direction of macroscopic s, i.e. the line-of-sight (regardless of the macroscopic velocity between Lorentz frames: note the discussion on super-luminal relations that follows equation [16]). The circular relationship in equation [12] means that light will propagate as a sine wave- and not as a hyperbolic sine. Since real 3-space is orthonormal to the plane defined by vectors s'i, p'i and t'i propagation will be in all directions (as distorted by gravitational effects in the vicinity of the elementary object and those of celestial objects), including that of macroscopic vector s, i.e. in a straight line toward an observer in Lorentz space-time. (The distortion inherent in Euclidean observation will make the line-of-sight appear bent by gravity). Since the orthonormal vectors are in the line-of-sight the (what we will recognise as electromagnetic) wave propagation of an elementary object will appear as an infinitesimal point in a Lorentz frame (we will learn hereunder how the photon model of electromagnetism also arises as a consequence of the geometry described herein, the present discussion concerns the wave model).
{kind=link}